
")
")
")
")
")
")
")
")
")
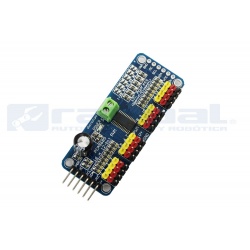
Modulo Driver I2C 16 Canales PCA9685, Servo Controlador
Módulo Controlador de servos PCA9685 , posee pines para conectar servomotores, y una bornera para la alimentación de los servos y pines I2C para comunicarse con Arduino.
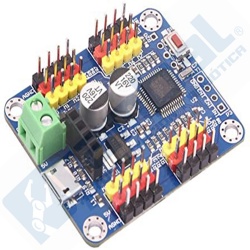
NOTA: Modelo actualizado. 42TE10W10(1+7)20
El Módulo Controlador de servos PCA9685 tiene la placa diseñada para el control de servos, tiene los pines en el orden correcto para simplemente conectar los servomotores, además una bornera para la alimentación de los servos y conectores para la alimentación de la parte lógica junto con los pines I2C para comunicarse con Arduino.
Se puede establecer la dirección I2C soldando los puentes A0-A5 con esto podemos usar el mismo bus I2C para controlar más módulos PCA9685 u otros dispositivos I2C.
Cada salida LED tiene un controlador PWM individual de 12 bits de resolución (4096 pasos) con una frecuencia fija.
El controlador funciona a una frecuencia programable de un típico 24Hz a 1526Hz con un ciclo de trabajo ajustable de 0% a 100% por lo que el LED se puede configurar para generar un brillo específico. Todas las salidas están configuradas en la misma frecuencia PWM.
Con el PCA9685 como chip maestro, el servocontrolador PWM de 16 canales y 12 bits solo necesita 2 pines para controlar 16 servos, lo que reduce en gran medida el E/S del ocupante.
El servocontrolador PWM de 16 canales y 12 bits PCA9685 puede ayudar mucho cuando no hay Pines de salida PWM suficientes para el MCU en su proyecto.
La única condición es que el chip de control principal admite comunicación I2C, lo que significa permitir la comunicación entre el chip y PCA9685, para controlar múltiples servos simultáneamente.
Además, se puede conectar a 62 placas de controlador como máximo de forma en cascada, lo que significa que podrá controlar 992 servos en total.
El PCA9685 es un controlador LED de 16 canales controlado por el bus I2C y optimizado para aplicaciones de retroiluminación de LCD Rojo/Verde/Azul/Ambar (RGBA).
Cada salida de LED tiene su propio controlador PWM individual de 12 bits de resolución (4096 pasos) que opera frecuencia programable de 40 Hz a 1000 Hz con un ciclo de trabajo ajustable del 0 al 100 % para permitir que el LED se ajuste a un valor de brillo específico.
Todas las salidas se ajustan a la misma frecuencia PWM.
Cada salida LED puede estar apagada o encendida (sin control PWM), o ajustada a su valor individual de controlador PWM individual. El controlador de salida del LED está programado para ser de drenaje abierto con una capacidad de disipación de corriente de 25 mA a 5 V con una capacidad de 25 mA de disipación y 10 mA de fuente a 5 V.
El PCA9685 funciona con un rango de tensión de alimentación de 2,3 V a 5,5 V y las entradas y salidas son tolerantes a 5,5 V. Los LEDs pueden conectarse directamente a la salida de LEDs (hasta 25 mA, 5,5 V) o controlados con controladores externos y una cantidad mínima de componentes discretos componentes discretos para LEDs de mayor corriente o voltaje.
El PCA9685 pertenece a la nueva familia Fast-mode Plus (Fm+). Los dispositivos Fm+ ofrecen una mayor frecuencia (hasta 1 MHz) y un funcionamiento del bus más denso (hasta 4000 pF).
algunas características únicas que lo hacen más adecuado para aplicaciones como la retroiluminación LCD.
Características:
- Tensión de Alimentación Electrónica: 3 a 5 Volts DC
- Tensión de Alimentación Máxima PWM: 6 Volts DC
- Frecuencia: 40 - 1000 Hz
- Número de Canales por Módulo: 16 Canales/Salidas
- Resolución PWM: 12 bits
- Interfaz de Control: I2C
- Tamaño: 62.3 x 25.3mm
- 16 controladores de LED. Cada salida programable en:
- Interfaz de bus I2C compatible con Fast-mode Plus a 1 MHz con capacidad de accionamiento de 30 mA en la salida SDA para accionar buses de alta capacidad
- Brillo programable lineal de 256 pasos (8 bits) por salida LED que varía desde totalmente apagado (por defecto) a la máxima luminosidad utilizando una señal PWM de 97 kHz
- El control de brillo de grupo de 256 pasos *** permite la atenuación general (utilizando una señal PWM de 190 Hz) desde el apagado total hasta el brillo máximo (por defecto)
- Parpadeo en grupo de 256 pasos con frecuencia programable de 24 Hz a 10,73 s y ciclo de trabajo del 0 % al 99,6 %.
- Dieciséis salidas en forma de tótem* (con un consumo de 25 mA y un consumo de 10 mA a 5 V) con software de selección de salidas LED de drenaje abierto programables por software (por defecto en tótem). Sin función de entrada.
- Cambio de estado de las salidas programable en el comando de reconocimiento o de parada para actualizar las salidas byte a byte o todas al mismo tiempo (por defecto en 'Cambio en STOP').
- Clavija de entrada de habilitación de salida (OE) activa LOW **. Salidas LED programables a 1 lógico, 0 lógico o "alta impedancia". (por defecto en el encendido) cuando OE está en ALTO, lo que permite el parpadeo y la atenuación de los LEDs por hardware.
- parpadeo y atenuación de los LEDs.
- 7 pines de dirección de hardware permiten conectar 126 dispositivos al mismo bus I2C
- 4 direcciones I2C-bus programables por software (una dirección de llamada de grupo de LEDs y tres direcciones de sub-llamada de LEDs) permiten direccionar grupos de dispositivos al mismo tiempo en cualquier combinación (por ejemplo, un registro utilizado para "Todas las llamadas" para que todos los PCA9635 en el bus I2C puedan ser direccionados al mismo tiempo y el segundo registro utilizado para tres direcciones diferentes para que 1⁄3 de todos los dispositivos del bus puedan ser direccionados al mismo tiempo en un grupo). Habilitación y deshabilitación por software para la dirección del bus I2C.
- La función de reinicio por software (llamada SWRST) permite reiniciar el dispositivo a través del bus I2C
- El oscilador interno de 25 MHz no requiere componentes externos
- Restablecimiento interno de la alimentación
- Filtro de ruido en las entradas SDA/SCL
- Control de velocidad de flancos en las salidas
- No hay fallos en el encendido
- Admite la inserción en caliente
- Baja corriente de espera
- Rango de tensión de alimentación de 2,3 V a 5,5 V
- Entradas tolerantes a 5,5 V
- Funcionamiento de -40 °C a +85 °C
- La protección ESD supera los 2000 V HBM según JESD22-A114, 200 V MM según JESD22-A115 y 1000 V CDM según JESD22-C101
- Las pruebas de Latch-up se realizan según la norma JESD78 de JEDEC, que supera los 100 mA
- Apagado
- Encendido
- Brillo de los LEDs programable
- Atenuación/parpadeo de grupo programable mezclado con el brillo individual de los LEDs
(*) Totem-Pole Output. Un tipo de estructura de salida que se utiliza con circuitos integrados en el que un transistor impulsa la salida a un nivel alto mientras que otro transistor conectado por debajo tira la salida a un nivel bajo.
Muchos circuitos integrados utilizan salidas Totem-Pole, de hecho, es tan común que la estructura de salida no se menciona en el título de la hoja de datos. Un IC con una salida Totem-Pole es la condición predeterminada. A diferencia de una Salida de colector abierto que siempre se indica en el título de la hoja de datos.
Una salida Totem Pole es esencialmente la misma que una salida Push-Pull; sin embargo, es la terminología que se usa comúnmente cuando se hace referencia a un dispositivo TTL. La principal diferencia entre este y un Push-Pull es la cantidad de corriente que puede hundir o generar. La salida de Totem Pole se hundirá / generará menos corriente de la que una salida Push-Pull es capaz de hundirse o generar. La otra gran diferencia es el voltaje de salida entre los dos. El tótem es solo una señal de 5 V CC, donde el empuje seguirá el voltaje de entrada.
(**) Active-Low and Active-High
Cuando trabajas con circuitos integrados y microcontroladores, es probable que te encuentres con pines que son activo-bajo y pines que son activo-alto. En pocas palabras, esto describe cómo se activa el pin. Si se trata de un pin activo-bajo, debes "tirar" de ese pin BAJO conectándolo a tierra. Para un pin activo-alto, lo conectas a tu voltaje ALTO (normalmente 3.3V/5V).
Por ejemplo, digamos que tienes un registro de desplazamiento que tiene un pin de habilitación de chip, CE. Si ves el pin CE en cualquier parte de la hoja de datos con una línea sobre él como esta, CE, entonces ese pin es activo-bajo. El pin CE debe ser jalado a GND para que el chip sea habilitado. Sin embargo, si el pin CE no tiene una línea sobre él, entonces es activo-alto, y necesita ser jalado a ALTO para habilitar el pin.
Muchos circuitos integrados tienen pines activos-bajos y activos-altos entremezclados. Asegúrese de comprobar los nombres de los pines que tienen una línea sobre ellos. La línea se utiliza para representar NOT (también conocido como barra). Cuando algo está NOTADO, cambia al estado opuesto. Así que, si una entrada activa-alta es NOTADA, entonces ahora es activa-baja. Así de simple.
(***) Paso. - La distancia o el movimiento del motor desde una posición activada a otra.
NOTA: SOLICITAR GUIA DE USUARIO (CLIENTES) despues de su compra.
También te puede interesar




16 otros productos en la misma categoría:


Generador Pulsos Controlador Stepper Motor

Regulador Velocidad Motor DC PWM 10 - 50V /40 A / 2000w BOX








Dimmer Regulador De Voltaje / Velocidad 220V 4000W-Sin Carcasa


Módulo Controlador de servos PCA9685 , posee pines para conectar servomotores, y una bornera para la alimentación de los servos y pines I2C para comunicarse con Arduino.